

Cursos e Produtos



Últimos tutoriais


Últimos Downloads


Galeria dos Membros

Colli
Maringá - AC

arq.andreis
caxias - AC

Estêvão Tacon
Goiás - GO

AlbertoMaciel
SC - SC

Rafael Reis
Rafael Reis - AC
Sapinho malvado..



ScreamingFox
 06/10/2015 00:15
Localização: Sp-SP-BR - AC
Registrado: 06/06/2013 12:45
06/10/2015 00:15
Localização: Sp-SP-BR - AC
Registrado: 06/06/2013 12:45
.jpg) Colaborador Aprendiz
(2651 pontos)
Colaborador Aprendiz
(2651 pontos)

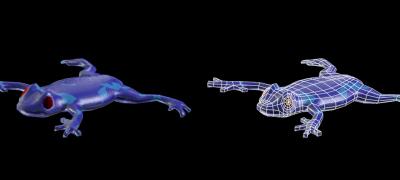
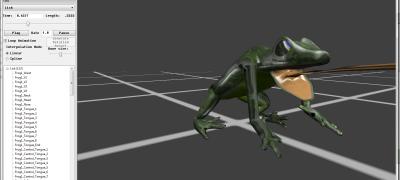
Feito hoje a tarde com um amigo olhando e tal.. Ele disse que precisava de um sapo e tal... É um model lowpoly de game XD.. Tá sem textura ainda só um mapa pra blend entre a \'barriga\' e o resto do corpo e outro material id pro olho.. Deixei com uns mapas procedurais pra ficar divertido da gente decidir a textura depois e fazer rtt =D..
(pus a espadinha de brincadeira hehe..)
(pus a espadinha de brincadeira hehe..)
A Beleza está entre a Ética e a Razão!..
AlexTerra
 07/10/2015 15:16
Localização: Brasil
Registrado: 07/02/2014 18:52
Colaborador Aprendiz
(860 pontos)
07/10/2015 15:16
Localização: Brasil
Registrado: 07/02/2014 18:52
Colaborador Aprendiz
(860 pontos)
Ta bem modelo, ta fazendo rig?
ScreamingFox
07/10/2015 19:01
Localização: Sp-SP-BR - AC
Registrado: 06/06/2013 12:45
Colaborador Aprendiz
(2651 pontos)
Nesse aí tem só os bones e skin, eu dei uma mudada na barriga dele e pus pra deixar esticar os links da lingua e tal, mas rig mesmo n tem n.. sexta talvez eu faça uma coisa tipo pra deixar movimento automatico e ik/fk, etc..
A Beleza está entre a Ética e a Razão!..
kybio
 10/10/2015 16:16
Localização: Porto Alegre - AC
Registrado: 21/09/2013 02:58
10/10/2015 16:16
Localização: Porto Alegre - AC
Registrado: 21/09/2013 02:58
 Colaborador Principiante
(318 pontos)
Colaborador Principiante
(318 pontos)
10/10/2015 16:16
Localização: Porto Alegre - AC
Registrado: 21/09/2013 02:58
Gostei cara!! Parabéns!![:D]
ScreamingFox
10/10/2015 17:42
Localização: Sp-SP-BR - AC
Registrado: 06/06/2013 12:45
Colaborador Aprendiz
(2651 pontos)
Q bom q vcs gostaram... eu n gostei tanto não hehehehehe XDDD...
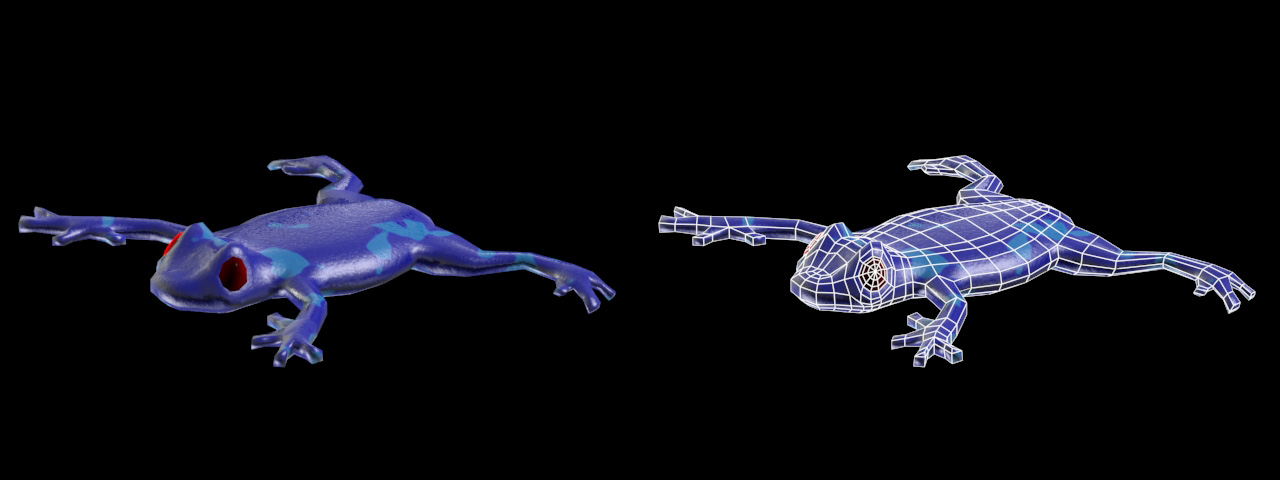
Tem uns angulos q parece decente até.. tipo o angulo do sapo amarelo sem vc clicar pra ele girar e tal xd..
Na verdade esse era pra ser a base de um model q eu ia fazer junto com os amigos (na real eu mexendo e o pessoal opinando e etc.. e com sorte aprendendo um pouco tbm q eu narro essas coisas enquanto eu faço, etc..).. Era pra ser meio q assim eu fazia o model no 3ds basico mesmo, mostrando as questões de modelagem e etc.. e então iriamos detalhar no Zbrush e tal, e então retopologizar no 3ds.. Mas o pessoal gostou de como ficou o sapinho de primeira no 3ds até pq brincamos bastante com ele e tal no dia xd..
Fiz o rig dele mas não foi como eu esperava realmente.. Pq fiz meio q um rig usando conceitos de braço perna e mão pras pernas e braços, e então não deu pra articular q nem num rig \'classico\' (tipo o IK/FK é diferente o esquema nessa situação) nem da maneira que eu inicialmente tinha concebido o Rig de Cinematica Parametrica (hehehe... batizei aquele esquema lá de redução de comportamento pra rig e tal, e chamo agora de \"PK\" (Cinemática Paramétrica ou Procedural (bonito o nome né =DDD, inventei, DIBS!!! =D, XD.. =3...)).. Aí n sei.. Vou fazer mais tipo uns 4 ou 5 sapos diferentes, aí vejo outros esquemas de rig pra sapo.. É diferente de quadrupedes, bipedes e rastejantes.. É um \'quasi-bipede\'.. ele as vezes vai andar nas 4 patas e quando para articula a espinha pro ombro ficar quase ortogonal com a direção frontal dos olhos (pros braços apontarem pra frente) e ele controlar os braços lá e tal, etc.. Acho q o PK (\"Cinematica Procedural\" hehehe...) dá conta bastante certinho de pernas, e o IK/FK dá bastante conta do movimento de braços, mas misturando uma coisa com a outra fica estranho.. mas também bastante interessante, vou experimentar mais com esse rig aí com os outros sapinhos.. :)...
@edit: Testando com a engine OGRE (mas vou ter q mudar umas coisas no rig q tão dando problema pra exportar.. aí aproveito e termino o mapeamento tbm xd..)..
Tem uns angulos q parece decente até.. tipo o angulo do sapo amarelo sem vc clicar pra ele girar e tal xd..
Na verdade esse era pra ser a base de um model q eu ia fazer junto com os amigos (na real eu mexendo e o pessoal opinando e etc.. e com sorte aprendendo um pouco tbm q eu narro essas coisas enquanto eu faço, etc..).. Era pra ser meio q assim eu fazia o model no 3ds basico mesmo, mostrando as questões de modelagem e etc.. e então iriamos detalhar no Zbrush e tal, e então retopologizar no 3ds.. Mas o pessoal gostou de como ficou o sapinho de primeira no 3ds até pq brincamos bastante com ele e tal no dia xd..
Fiz o rig dele mas não foi como eu esperava realmente.. Pq fiz meio q um rig usando conceitos de braço perna e mão pras pernas e braços, e então não deu pra articular q nem num rig \'classico\' (tipo o IK/FK é diferente o esquema nessa situação) nem da maneira que eu inicialmente tinha concebido o Rig de Cinematica Parametrica (hehehe... batizei aquele esquema lá de redução de comportamento pra rig e tal, e chamo agora de \"PK\" (Cinemática Paramétrica ou Procedural (bonito o nome né =DDD, inventei, DIBS!!! =D, XD.. =3...)).. Aí n sei.. Vou fazer mais tipo uns 4 ou 5 sapos diferentes, aí vejo outros esquemas de rig pra sapo.. É diferente de quadrupedes, bipedes e rastejantes.. É um \'quasi-bipede\'.. ele as vezes vai andar nas 4 patas e quando para articula a espinha pro ombro ficar quase ortogonal com a direção frontal dos olhos (pros braços apontarem pra frente) e ele controlar os braços lá e tal, etc.. Acho q o PK (\"Cinematica Procedural\" hehehe...) dá conta bastante certinho de pernas, e o IK/FK dá bastante conta do movimento de braços, mas misturando uma coisa com a outra fica estranho.. mas também bastante interessante, vou experimentar mais com esse rig aí com os outros sapinhos.. :)...
@edit: Testando com a engine OGRE (mas vou ter q mudar umas coisas no rig q tão dando problema pra exportar.. aí aproveito e termino o mapeamento tbm xd..)..
A Beleza está entre a Ética e a Razão!..


