

Cursos e Produtos



Últimos tutoriais


Últimos Downloads


Galeria dos Membros

Daian
Belo Horizonte - MG

loskim
Goiânia - GO

César Augusto
São Paulo - Itapevi - SP

Alex
Belém - PA - PA

bender
Lajeado-RS - RS
GRUPO DE ESTUDO: Criação e Animação de Personagens


Edson
 10/10/2008 08:43
Localização: Salvador-Bahia - BA
Registrado: 12/02/2005 20:00
10/10/2008 08:43
Localização: Salvador-Bahia - BA
Registrado: 12/02/2005 20:00
 Especial
(2806 pontos)
Especial
(2806 pontos)
10/10/2008 08:43
Localização: Salvador-Bahia - BA
Registrado: 12/02/2005 20:00
Muito boa as animações, stenio_melo.
Se der uma movimentação lateral em seu personagem vai ficar melhor ainda.
Quem sabe fazer um walk cycle com ele.
Parabéns!
diegobm
 11/10/2008 10:51
Localização: SANTOS/SP
Registrado: 05/09/2007 20:27
11/10/2008 10:51
Localização: SANTOS/SP
Registrado: 05/09/2007 20:27
 Colaborador Principiante
(126 pontos)
Colaborador Principiante
(126 pontos)
11/10/2008 10:51
Localização: SANTOS/SP
Registrado: 05/09/2007 20:27
ótimo tópico Edson!! :D
vai me ajuda muito.
mas os tutoriais devems er seguidos em ordem ou pode ser qualquer ordem? nao iria dificultar meu ensinamento indo em qualquer ordem?
vlw!!!
3DS_MAX
stenio_melo
 11/10/2008 13:31
Localização: Recife / PE
Registrado: 22/09/2008 11:49
11/10/2008 13:31
Localização: Recife / PE
Registrado: 22/09/2008 11:49
 Colaborador Novato
(33 pontos)
Colaborador Novato
(33 pontos)
11/10/2008 13:31
Localização: Recife / PE
Registrado: 22/09/2008 11:49
Valew Edson!!!
O que seria Walk Cicle??? Ainda sou novatão no 3D... ehehhe!!!
== Jesus Cristo SAVE!!! ==
hendyo
 12/10/2008 05:21
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
Colaborador Novato
(18 pontos)
12/10/2008 05:21
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
Colaborador Novato
(18 pontos)
12/10/2008 05:21
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
bom primeiramente eu queria pedir desculpas pela demora , tive uma semana com muito trabalho mas arrumei um tempinho e fiz esse tutorial basicão de rigg das pernas
vamos la
o primeiro passo é construir os bones da perna, femur,tibia, tarso e metatarso(imagem 1 ) de acordo com seu personagem é claro.
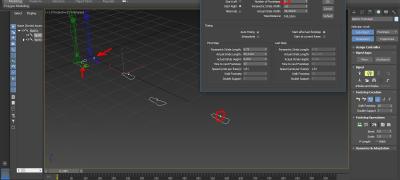
depois de criada a estrutura vamos por os respectivos iks ... selecionando o bone do femur vai na aba animation > ik solvers > ik limb solver
e depois selecione o tarso (imagem 2 e 3 ) vai aparecer o ik na altura do tornozelo que ao mexer levantara a estrutura da perna, seguindo ... selecione o tarso > aba animation > ik solvers > hi solver > meta tarso
e por fim , selecione o meta tarso > aba animation > ik solvers > hi solver > end bone
entao vc tera todas os iks no lugar certo ...
agora colocaremos os controladores
a função de um controlador obviamente é controlar a parte que le é comandada no caso os iks ... cada controlador ira controlar um ik
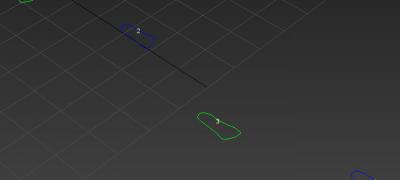
entao crie um controlador para a base do pé ( sera controlador do ik do tornozelo ) do tarso e do meta tarso. como mostra a imagem de numero 7
alinhe os controladores do tarso e do meta tarso e posicione o controlador da base do pé de forma que ocupe o pé inteiro ... depois no menu de hierarquia com o botao affect pivot only alinhe o pivo do controlador do pé ao ik do tornozelo
e finalmente linke os iks a seus respectivos controladores tornozelo - base do pe tarso - tarso meta tarse - meta tarso
agora os controladores vao ter que seguir em conjunto linke o controlador do meta tarso no controlador do tarso e o controlador do tarso no controlador da base do pé
e fim :D
faça isso nas duas pernas e ao finalizar salve (SEMPRE)
crie um box ou qualquer objeto que se adapte melhor para ser a pelvis do seu personagem, depois
de devidamente posicionado like os femures na pelvis.
agora vamos fazer com que quando vc mexer o controlador dos pés a pelvis siga isso facilita na hora de animar
entao selecione a pelvis
vai na aba animation > constrains > position constrant > e clique em um dos controladores do pe
provavelmente depois que vc fizer isso a pelvis ira pra baixo amaçando toda sua estrutura , nao se preocupe
no menu motion , na aba position constrain selecione keep initial offset ... e tudo voltara ao normal
nessa mesma aba selecione o botao add position target e depois clique no controlador q falta
vc vai reparar que a pelvis nao mexe mais ... isso é pq na aba position list esta selecionado position constraint
vc tera que abilitar um novo x,y,z zerado pra ela poder se mexer novamente ... entao na aba assign controller
procure dentro da aba position a gaveta available selecione a e vá ate a janelinha de assign controller representada pelo ponto de interrogação
vai abrir uma janela com varios nomes procure position XYZ de ok
e de novo na aba positon list ative esse novo position XYZ agora sua pelvis mexe normalmente
agora pra finalizar vamos criar os controladores do joelho
crie dois points ou qualquer geometria que vc queira pra ser seu controlador
posicione eles na altura do joelho deixando uma certa distancia entre eles e o joelho
vá no ik do tornozelho e no menu motion > na aba ik solver properties > aperte o botao pick target e selecione o controlador do joelho da mesma perna do ik
depois linke o controlador do joelho no controlador da pegada
e FIMMMM
AHUHUAUHAHUUAHUHAHUA
bom espero que tenha sido util pra alguem ...
duvidas , criticas , xingamentos ou qualquer tipo de comentario é só postar ai
beijundas ^^
hendyo
12/10/2008 05:32
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
Colaborador Novato
(18 pontos)
12/10/2008 05:32
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
respondendo ao stenio
cara ta muito legal suas animações
parabens
pessoalmente gostei muito do seu personagem
ele é ...... fofo hauahuahuhua
e walk cicle ... é nada mais do que o circulo de caminhada do teu personagem ... como seria a personalidade dele ao andar ... é mais ou menos isso
abração :P
e a proposito
se alguem puder me ajudar a como fazer o squash e strech de bones eu agradeço ... ate hj ainda nao consegui fazer isso direito
ahahauuhahua
abração galera
Renato Araujo Sinkere da
 12/10/2008 15:25
Localização:
Registrado: 07/03/2008 18:59
Colaborador Novato
(19 pontos)
12/10/2008 15:25
Localização:
Registrado: 07/03/2008 18:59
Colaborador Novato
(19 pontos)
iai jente foi mal pela demora nao tive muito tempo...
:-P :-P :-P
hendyo eu queria fotos de um cachorro mais real,se puder me arrumar algumas muito :D :D :D :D :D
o stenio seu personagem ta ficando bem legal,parabens
vlwww
hendyo
12/10/2008 16:52
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
Colaborador Novato
(18 pontos)
12/10/2008 16:52
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
renato foi mal cara acabei esquecendo ... bom um amigo me passou esse link aki e é muito bom ... tem anatomia ossea e muscular é só ir passando as paginas pra ver as imagens
http://digicoll.library.wisc.edu/WebZ/FETCH?sessionid=01-45244-204982505&recno=1&resultset=4&format=F&next=html/nffull.html&bad=error/badfetch.html
espero q ajude
ederson tavares borges
 13/10/2008 21:06
Localização: ederson tavares borges - AC
Registrado: 02/09/2007 17:05
13/10/2008 21:06
Localização: ederson tavares borges - AC
Registrado: 02/09/2007 17:05
.jpg) Colaborador Aprendiz
(415 pontos)
Colaborador Aprendiz
(415 pontos)
13/10/2008 21:06
Localização: ederson tavares borges - AC
Registrado: 02/09/2007 17:05
hendyo blz? boa noite, muito bom o seu tuto me ajudou muito essa tecnica vai facilitar muito minha animção, mais claro que naum poderia faltar uma duvida hauhauhau este mesmo procedimento podemos aplica-lo do controlado da pelvis pra o controlador no peito onbro e braços ou so para as pernas com a pelvis mesmo???
hendyo
14/10/2008 00:17
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
Colaborador Novato
(18 pontos)
14/10/2008 00:17
Localização: rio de janeiro
Registrado: 24/07/2007 03:02
ederson ... na verdade a ideia dos controladores é facilitar o acesso de mover os iks .... entao onde tiver ik ou algo que possa ser movido de dificil acesso vc pode um controlador pra ficar mais facil
o rig funciona de forma semelhante a imagem da marionete ...
o boneco é o modelo com bone e skin ... as linhas são os iks e as madeiras seriam os controladores ...
espero que tenha esclarecido ...
abraços ^^
megomes
 14/10/2008 14:02
Localização: Brasilia
Registrado: 16/07/2007 09:33
Colaborador Principiante
(331 pontos)
14/10/2008 14:02
Localização: Brasilia
Registrado: 16/07/2007 09:33
Colaborador Principiante
(331 pontos)
14/10/2008 14:02
Localização: Brasilia
Registrado: 16/07/2007 09:33
Cada dia melhor a pariticiáção aqui hein ;D
hahahah um dia eu ainda crio coragem e projeto um personagem legal!
por enquanto... boa sorte a todos!

